Jaap Kaandorp (Informatics Institute) received for the UvA a grant of 750 kEuro for investigating genetically-programmable self-patterning swarm organs (SWARM-ORGAN) applied in biological morphogenesis. The project is funded by FP7 STREP 601062 and is a collaboration between:
- University of Amsterdam, the Netherlands (Jaap Kaandorp)
- – Fundacio Privada Centre de Regulacio Genomics, Spain (James Sharpe, coordinator)
- University of Surrey, UK (Yaochu Jin)
- The John Innes Centre, UK (Veronica Grieneisen)
The project is expected to start in January 2013. The grant will be used for a PhD and a postdoc position at the UvA. There is a close link between other ongoing research projects (Sophocles and Topdrim) on complexity at the Section Computational Science of the Informatics Institute.
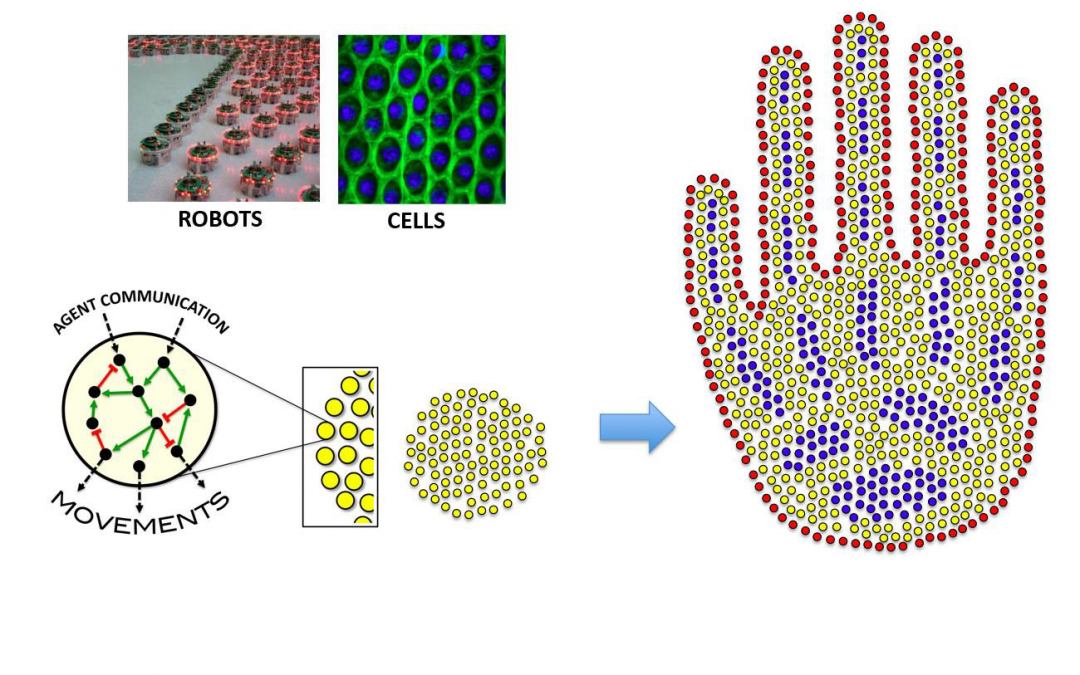
The SWARM-ORGAN project will focus on systems containing large numbers of autonomous but relatively simple agents, whose goal is to collectively organise themselves into complex spatial arrangements despite each agent having only local awareness. This particular question is directly relevant to both biological morphogenesis, and to new paradigms of distributed technology such as robotic swarms and amorphous computing. Two levels of adaptation are either evident or required in these systems: (1) As the whole system changes over time, individual agents find themselves in different local situations and must adapt and adjust their behaviour accordingly, for example dealing with conflict resolution and/or cooperation with neighbours. (2) The swarm must also adapt to the outside world (or the world it is embedded in) in various ways depending on its task – for example, coping with damage, maintaining functionality under changing environmental conditions, or tracking objects. A fundamental challenge in this area is how to design the local control system of each agent, and the SWARM-ORGAN project will extensively explore a specific approach – namely the use of GRNs (gene regulatory networks) – as a potentially powerful control method for these systems. By focusing on GRNs we will develop a theoretical framework about distributed adaptive control, which will be equally informative in both understanding natural biological morphogenesis, as well as helping to design next generation technologies.